先進安全技術による運転支援を行う「3つの領域」
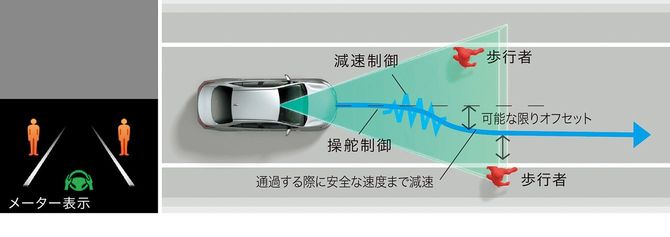
A「歩行者/自転車運転者/駐車車両に対する操舵・減速支援」として、横断中を含む歩行者や自転車に対して自車が近づいて行く場合、報知とともにブレーキ制御を行い、さらに余裕がある場合にはステアリング制御を併用して危険な状態に近づかないよう車両を制御する。
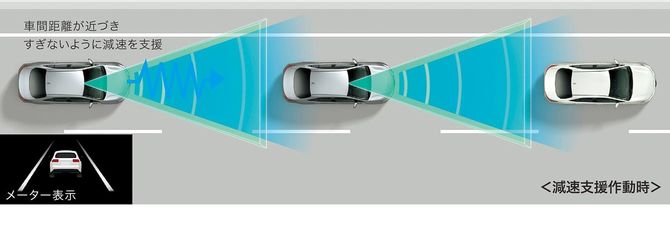
B「先行車に対する減速支援」として、ドライバーがアクセルペダルから足を放した状態で、前走車に対して接触や衝突などの危険性が高まりそうな場合、非常に弱いブレーキ制御を自動的に介入させる(=車間を空ける)。割り込まれ、車間が急に狭まった場合にも機能する。
C「カーブに対する減速支援」として、ドライバーがアクセルペダルから足を放した状態で、進路のカーブ曲率に対して自車速度が速いとシステムが判断した場合には非常に弱いブレーキ制御を自動的に介入させる(=カーブを安全に走行する)。

A~Cの機能は日頃の運転操作にとても効果的だ。またこれらの機能は、一般道路/高速道路、どちらでも機能し、さらにエンジンを掛けて乗り出せばいつでも機能がオンになっているから恩恵を受けられる率が高い。
「人とクルマが仲間のように共に走る」思想で作られた技術
このうち筆者はBの機能を一般道路で体験した。減速支援は減速タイミングを3段階(ここでは便宜上、早い/普通/遅いと表記)から任意で選ぶことができる。
筆者は試乗時、この3段階のすべてを試してみたが、自身が運転中、前走車との距離が近づいたと判断してブレーキペダルを踏むタイミングと、先の「早い」はほぼ一致していた。
トヨタでは自動運転技術に対して「Mobility Teammate Concept」という名称を用い、人とクルマが仲間のように共に走るという考え方のもと技術の作り込みを行っている。自動運転技術の礎である先進安全技術にもその考え方が導入され、今回試乗したノア&ヴォクシーにも搭載された。
繰り返しになるが、衝突被害軽減ブレーキをはじめとした先進安全技術は事故の危険を察知して、未然にドライバーへと回避動作を促す機能だ。その上で、ドライバーが何らかの理由で回避動作ができない場合、ブレーキ制御やステアリング制御に自動的に介入し、被害を軽減、もしくは事故そのものを未然に防ぐ。